






ROSINA (RObotic System for INtubAtion) is a robotic system to guide the introduction of a fiberscope into the airways of a patient, avoiding damage and in the meantime separating the doctor from the patient, useful in the pandemic period.
It is composed by a small console placed on a wheeled stand, which on the opposite side hosts a robotic actuator which, using either disposable or reusable (after re-sterilization) push pull elements which can be removed separately, grabs the tube of the fiberscope pushing it into the throat of the patient while allowing rotation on its axis while the fiberscope is suspended above the robotic actuator by a wire connected through pulleys to a counterweight.
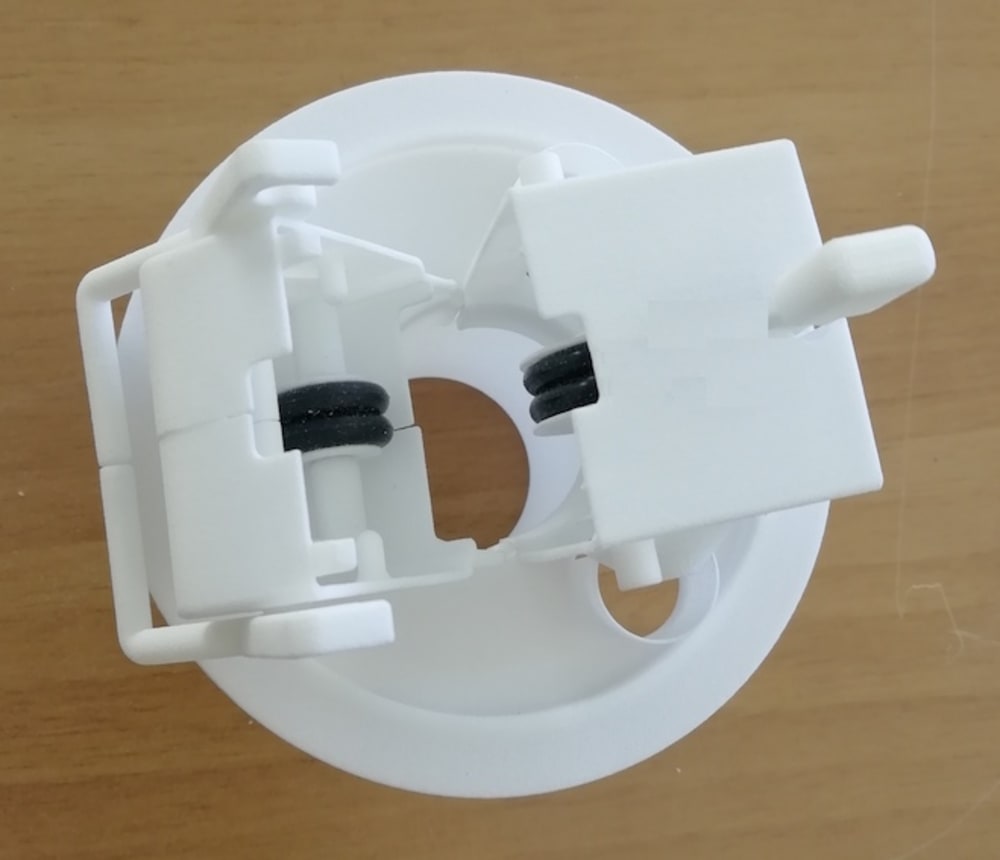
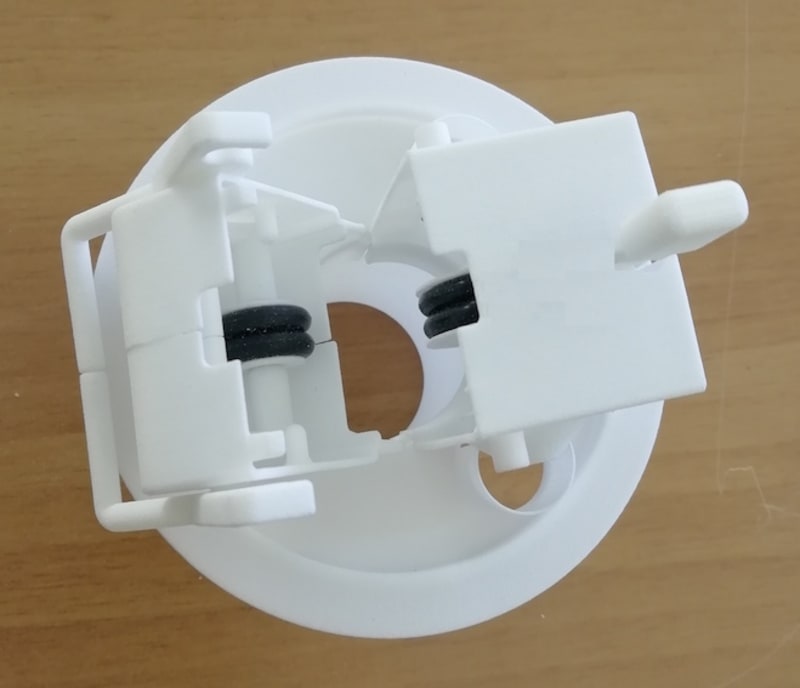
The fiberscope is secured to a special clamp that allows blocking any fiberscope while the tip motion is ensured by a servomotor placed on the clamp.
Once the fiberscope reaches the right point of the trachea, blocking an electronic brake ensures that the counterweight cannot pull the fiberscope, and the push pull disposables or reusable elements are separately detached from the robotic actuator, leaving a sterile passage of 36 mm in diameter.
Thus the cannulas, previously mounted on the fiberscope, can be made to slip into the throat of the patient, then unlocking the brake, the fiberscope can be easily pulled away acting on the guided counterweight, the stand can be removed, and the connection to the respirator established.
A particular sterilizable universal adaptor is to be connected to each fiberscope that allows positioning any fiberscope in the right position to be locked on the clamp so that the servomotor results aligned with the leverage that commands tip motion.
The entire operation is governed by two simple joysticks, one to push and rotate the fiberscope, the second to command the tip rotation.
Like this entry?
-
About the Entrant
- Name:Guido Danieli
- Type of entry:teamTeam members:Guido Danieli
Pasquale Francesco Greco
Gabriele Larocca - Software used for this entry:Old version of PROE
- Patent status:pending