Boise State University, VIP 400 Vertically Integrated Projects Section 007 Make It Spring 2021
The issue of an easy to use, easy to produce, rugged and weatherproof prosthetic is becoming a reality. With various 3D printing media and styles a wide variety of solutions can be brought to bear on this problem.
In the first world this allows those who want to start or resume outdoor activities, from camping, to fishing, to hunting. This requires a prosthetic that can handle both shock, but weight and stresses not normally designed for with modern electronic prosthetic solutions. Particularly at the low price point that sees equitable distribution of this technology. Further by creating a rugged and low cost and locally producible product this has the potential to meet the requirements of children who will have to have several devices over their lifetime. Further this project worked to have a device that has the durability that these uses would tend to require.
These same features that are important but not critical, can be adapted for less developed regions. These locations are where these requirements would be necessary for labor. Where things like fishing, hunting or farming make the difference from having meaningful labor or needing assistance. It acts as an economic multiplier by ensuring that a person is able to contribute to a society, with all the social, psychological benefits that go with that.
Myocensors
How does it function?
myo end of a sensor is placed on the forearm, and there are emg sensors that will pick up the electric potential generated by the muscle cells.
Placement?
should always be placed along the length of the muscle, with the electrode closest to the wire connections placed at the middle of the muscle and the second electrode on the circuit board towards the end of the muscle
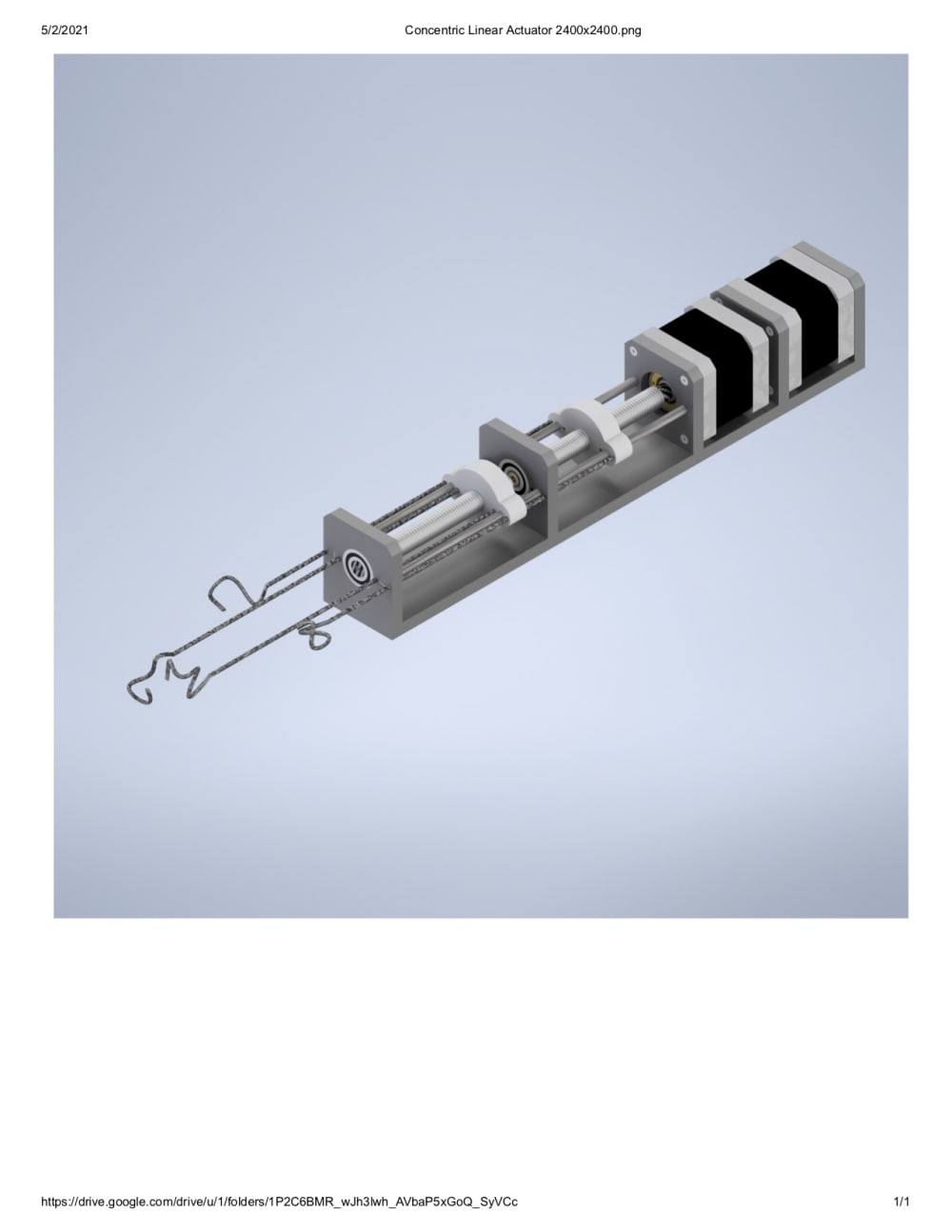
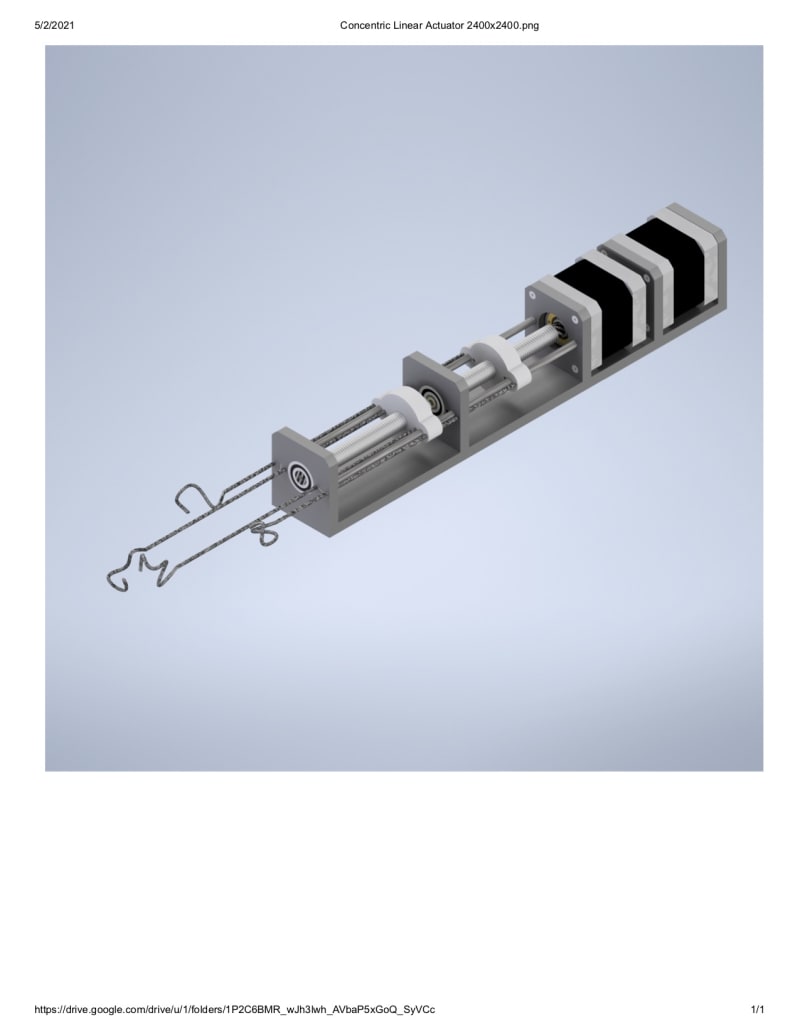
The CAL (Concentric Accelerator Linear) is mounted in the prosthetic arm and will act individual tendons to tighten fingers. In the initial prototype there is one eventually 3 will be able to meet most needs.
for the bottom 3 fingers largely for grasping
for pointer - trigger finger fine work and trigger. This may be better if it is static until using the myocensors in a preset “Konami Code” will bull the trigger as a safety feature.
Thumb independent.
These motors may be set for different speeds trigger finger for smoothness - medium. Grasping - fast, thumb slow. These would be defaults that could be overridden based on the clients needs - wants.
Torque formula
T= r F sin Ө
T= torque
R = radius
F= force
sin Ө = angle between f and level arm, in this instance between the fishing rod
Rod torque
Experienced whenever a fishing rod is loaded, this can be either while casting or retrieving a lure, setting the hook, or in battling a fish. The force is applied to the tip end of the rod, and creates a force at the opposing handle end that the angler must manage
Fishing torque
Like this entry?
-
About the Entrant
- Name:Steven Merrill
- Type of entry:teamTeam members:Abriona Bozha, Gabriella Coto, Mason Francsak, Hayden Golay, Mason Keffalos, Steven W Merrill, Stephen Richardson, Eric Storch
- Software used for this entry:Solidworks
- Patent status:none