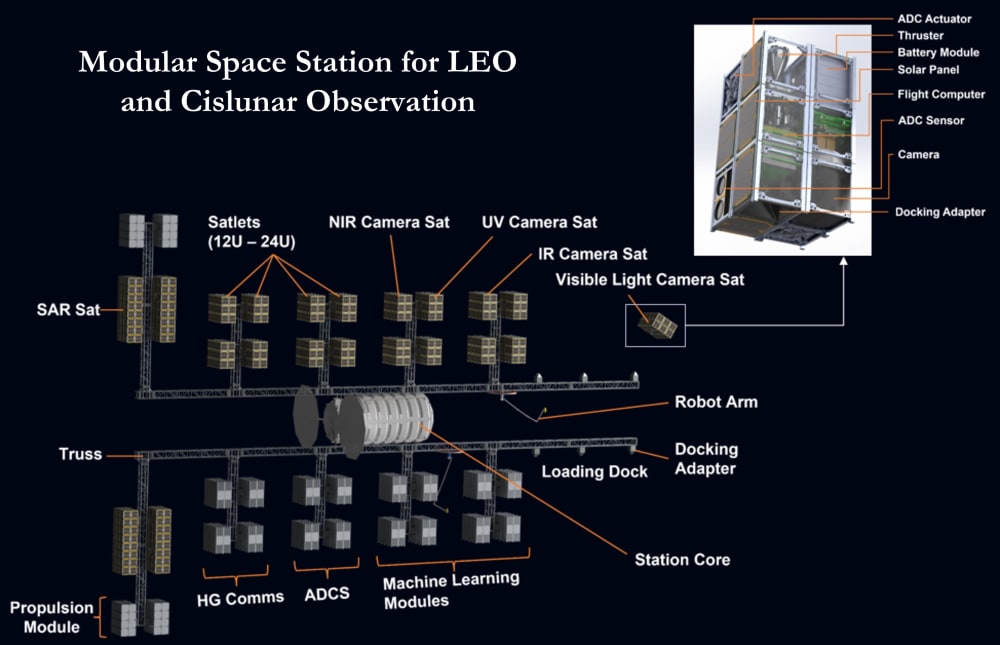
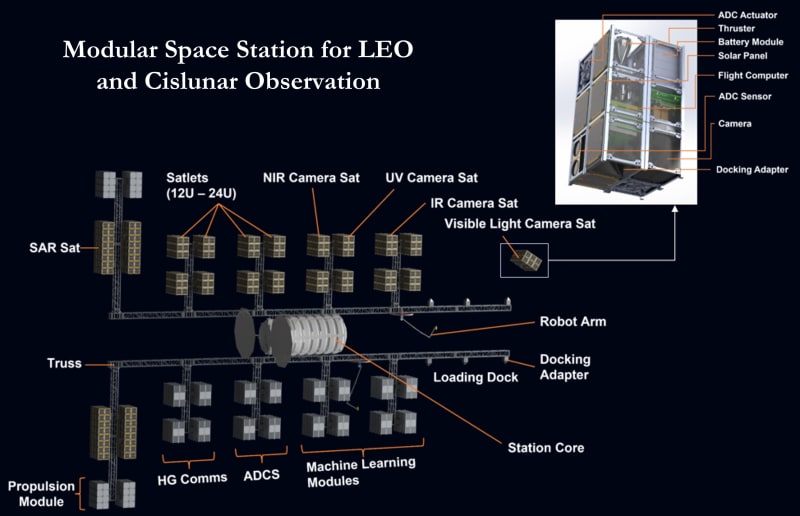
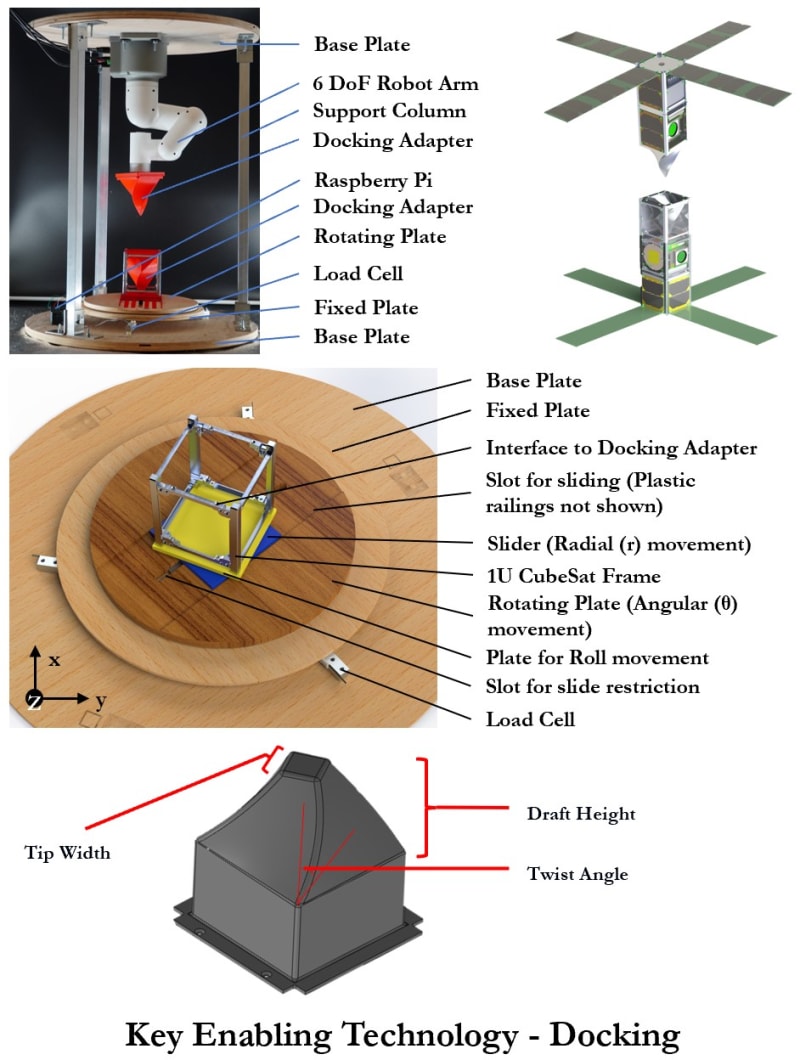




This entry contains a novel swarm control technology for aerospace applications that enable on-orbit servicing, collaboration, and coordination. Certain classes of reconfigurable modular robotics systems are intended to function like social insects or multicellular animals, where millions of cells work together to ensure the survival of the whole. While each cell is simple, has a short life span, and is limited, they work together to create a robust system more capable than the sum of its parts. As a result, these methods can outperform traditional design and control methods. However, the more pressing challenge is, putting this promise into practice. Even though reconfigurable modular robots are potentially superior to traditional robots since they allow for parallelism and optimal task-specific configurations to tackle complex tasks, challenges in docking technology and inter-satellite communication and collaboration have kept these systems from being used in the field. However, because of recent advances in tiny spacecraft docking and proximity operations, modular robotic constructions in space are becoming a reality in a process known as on-orbit or in-space assembly. Earth observation, space observation, and exploration spacecraft are typically enormous, weighing a few tonnes. They are built-in specialist cleanrooms, tested in specialized test facilities for vibration, thermal, and other pertinent space conditions, then launched atop an expensive launch vehicle. We believe that by building similar, huge spacecraft out of modular tiny spacecraft on-orbit, we can reduce the complication of deploying large spacecraft from Earth.
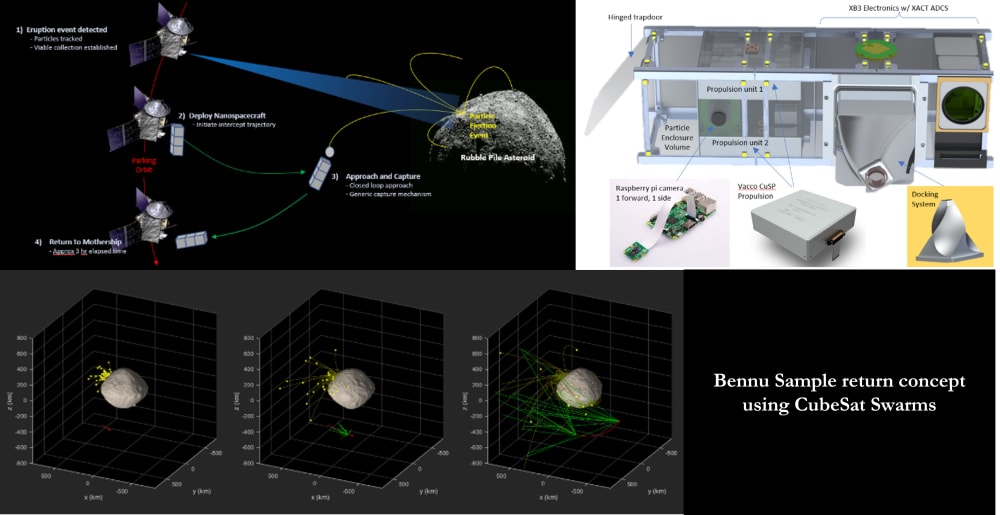
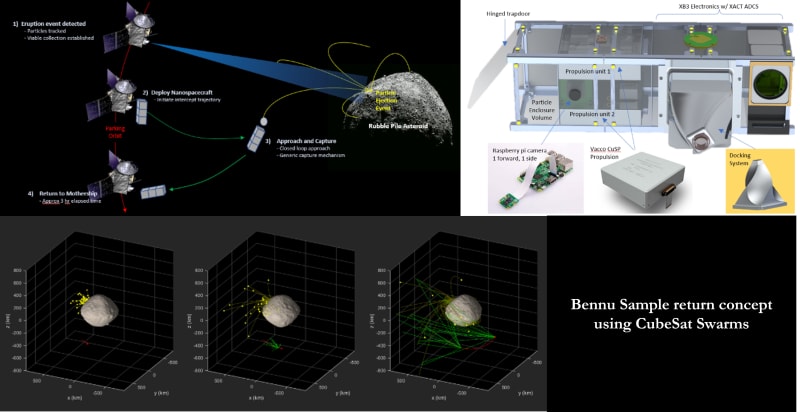
Swarm technology also enables a mission with less risk than asteroid sample and return techniques currently utilized. A mother/daughter architecture is proposed in which the mother spacecraft never leaves a safe orbital altitude, instead deploying nano-spacecraft which would harvest particles as they are ejected from the surface of the asteroid being orbited. Upon detecting particle eruptions such as those documented on Bennu, the mothership establishes which particles can be harvested within the delta-V and time constraints of the nano-spacecraft, and then deploys a swarm to collect several particles in parallel. Techniques of guidance, navigation, and grappling developed for such a mission would potentially reduce the cost of future sample and return missions, while also enabling other high-value missions such as low earth orbit debris capture and on-orbit servicing by nano-spacecraft.
With some thought (and some observability analysis), it can be shown that the position and velocity of the target and observer satellites can, in fact, be inferred from a single line of sight history. With some dependence on geometry, it can be asserted that any inertial line of sight history between two objects gravitationally influenced by a common source is the result of unique target and home spacecraft trajectories. The resulting position and velocity vectors should therefore be observable over time, with observability roughly related to the differential acceleration between the two bodies. Since differential accelerations are significantly different between different swarm members, it follows that observability is as well. Track selection can be optimized based on this to improve the overall performance of swarm navigation by a factor of 3 or more.
Video
-
Awards
-
 2022 Top 100 Entries
2022 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Athip Thirupathi Raj
- Type of entry:teamTeam members:Athip Thirupathi Raj, Leonard Vance, Jekan Thangavelautham
- Software used for this entry:Solidworks, MATLAB, Autodesk 3DS MAX, Ansys Workbench, Jupyter Notebooks
- Patent status:none