



Innovation:
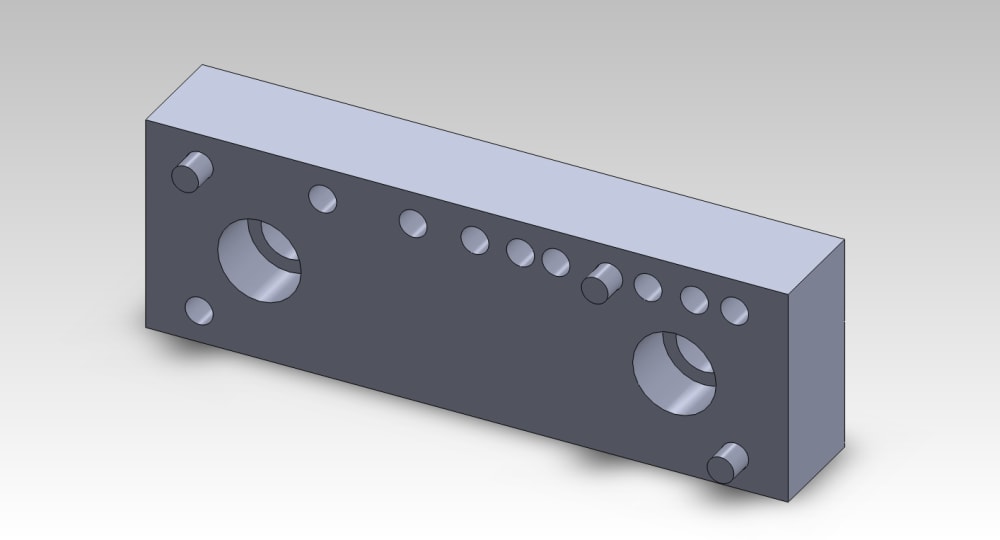
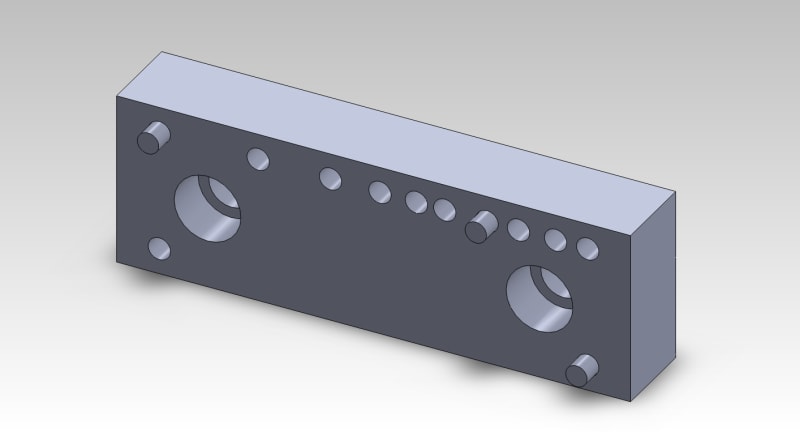
I have designed and built a prototype replaceable vise jaws for use as a combined parallel and angle setting device. There are recently produced products that operate similarly, however, they use compressed air to "activate" the pins and all but the needed ones must be retracted. This has to occur every time the vise is opened and closed.
My design uses spring loaded pins that stay extended and will retract out of the way when the vise is clamped, and re-extend when the vise is opened again.
Also, by using springs, it removes the requirement of compressed air, which is a large energy consumer in manufacturing, as well as allowing the spring force to be tailored for specific applications. Including vise jaws.
I am currently designing a version for use as robotic end effectors which allow for misalignment of parts.
The design is novel, because every similar concept I have seen from trade shows/magazines, involves only focusing on the replacement of parallels as a setting device. No one to my knowledge has explored the idea of using pin setters to simultaneously allow for setting parts in a parallel or angular orientation.
This is achieved by choosing pin locations along the face of the jaw that correspond to specific angles. By extending any two sets of pins, angles from 1-10, in increments of 1 degree, and 15-85, in increments of 5, can be selected.
Feasibility:
I have already manufactured a prototype using entirely manual machines. The intention when developing the design was to allow the jaws to be made without the use of specialized equipment. However, CNC capabilities would greatly improve the ability to manufacture them quickly, and at a scale appropriate to the growing size of manufacturing industry.
I have demonstrated the capability of the design by using it in a vise. I have also tested the angular accuracy of the pins, and achieved a 0.06 to 0.1 degree (max) tolerance despite using sub-optimal equipment and with minimal effort.
Every part is easily and cost-effectively manufactured. The main jaw body can be fabricated on any 3 axis machine. The jaw backing uses flat ground stock and a simple counter-bored pattern to hold the springs in position. The springs are sourced online as a common stocked item. The pins can be either common ground dowel pins, or easily manufactured on lathes with live tooling.
Marketability:
The intended market for this product is toolroom/prototyping shops dealing with low part runs in research and development.
I have found even in my own personal experience, that trying to support work-pieces at specific angles, especially those requiring multiple angle blocks, to be a big hassle. This leads not only to inaccuracy, but a lack of repeatability and wasted time to measure positions. This particular market has been chosen because in pursuing the automation and CNC market, suppliers have ignored the shops that deal with low part counts, and who do not necessarily allow for large investments in automation.
Like this entry?
-
About the Entrant
- Name:Robert Herman
- Type of entry:individual
- Profession:
- Number of times previously entering contest:2
- Robert's favorite design and analysis tools:Solidworks and Matlab
- Robert is inspired by:What inspires me is to build cool stuff. I've designed heliostats where 550 mirrors focus onto a block of aluminum to heat water, to walking robots, to converting tractors to electric, to trying out machine learning. The rush starting a project that requires and entirely new set of skills never stops being exhilarating.
What inspires my designs is the K.I.S.S. principle. and Occam's razor. I love to optimize designs and see how simple I can make something. There is a pervasive culture in engineering to over-complicate designs (and I admit they make for cool ideas), but I get my gratification from seeing what I can remove rather than what I can add.
And to hear from others working or repairing the machines I design, that the little quality of life changes I made to make their lives easier, also helps. - Software used for this entry:Solidworks
- Patent status:none