



Robotics is a part of today's communication. Nowadays many industries are using robots, due to their high level of performance, which is a great help for humans society. Likewise in many industries, we have seen that heavy components which they have to move from one place to another place, which is not possible without the help of machines. So along with this problem, an innovative solution provided is an obstacle avoiding robot.
It is designed to allow the robot to navigate in an unknown environment by avoiding collisions.
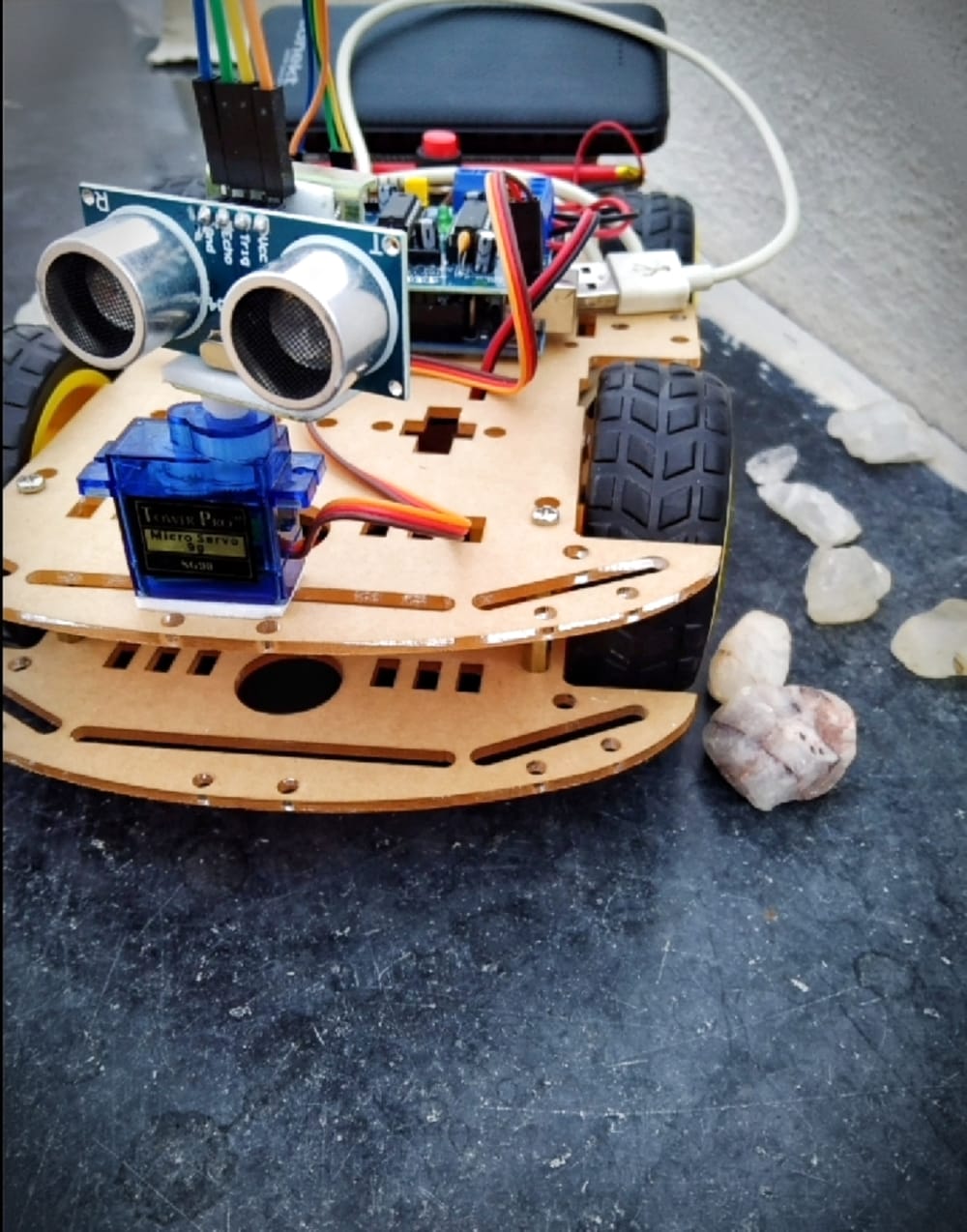
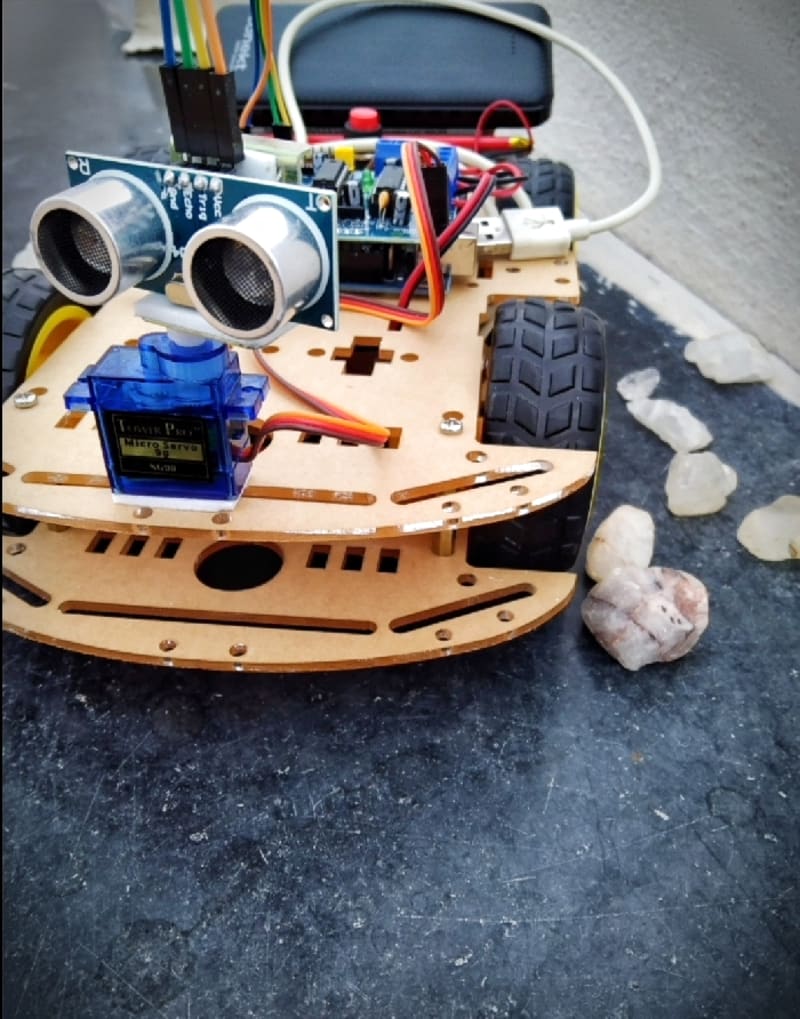
This robot is constructed using AT mega 8 families micro-controller (Arduino Uno R3). The ultrasonic sensor issued to detect an obstacle with edges and sends a command to the microcontroller. The micro-controller, based on the received input signal, redirects the robot to push in an alternative direction by actuating the motors that are interfaced with it via a motor driver. Depending on the situation the robot is able to choose the correct path. A decision making process of obstacle avoiding edge detection occurs spontaneously here. This robot was designed to think about its day-to-day potentialities. Obstacle avoidance in robots can bring more flexibility in varying environments and it would be much more efficient for us. So the continuous human monitoring is not required for this robot.
Video
Like this entry?
-
About the Entrant
- Name:Mythili M
- Type of entry:individual
- Software used for this entry:ARDUINO PACKAGE
- Patent status:none