





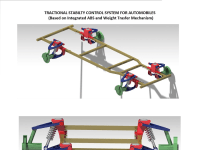

Tractional Stability Control System for Automobiles is an innovation that has been specifically designed to provide stability to the vehicle during extreme maneuvers like high-speed cornering. This innovation can prove as one of the most effective safety installations in an automobile. This system incorporates use of vehicle dynamics to enhance the handling characteristics of the vehicle during extreme vehicle operations like cornering. The system is comprised of a dynamically varying wheelbase (Weight Transfer Mechanism) which can vary the normal load acting on the tires which in turn modifies the tractive forces of the tire. The stability of the vehicle completely relies on the tractional forces (longitude and lateral forces) of the tire.
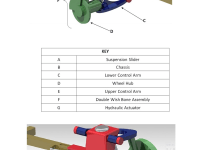
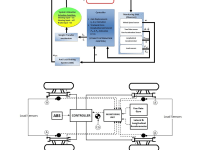
There are four main sub-systems of this invention that operate in a constant feedback loop to stabilize the vehicle maneuver. It consists of a Weight Transfer Mechanism, Anti-lock Braking System, a Monitoring unit consisting of vehicle sensors and a Controller. The system is triggered when the vehicle sensors observe that the vehicle is entering a Transient state cornering maneuver. The function of Monitoring Unit and Controller is to constantly monitor and process the sensor data respectively. The purpose of the monitoring unit would be to acquire data from vehicle sensors and provide a continuous feed to the controller. The controller would perform all the necessary processing and produce control signals to actuate weight transfer mechanism to produce required displacements to ensure stability of the vehicle pertaining to current vehicle state. The monitoring unit comprises of mainly wheel speed sensors, yaw rate gyros, lateral and longitudinal accelerometers and load sensors for each suspension sub-assembly. The control signals generated by the controller are fed to the weight transfer mechanism which produces the required displacement of the wheels to ensure the stability of the vehicle. The Weight Transfer Mechanism comes only in action when the system actuates it after sensing that the vehicle is about to corner. The basic principle on which this mechanism is based is the effect of braking. The effect of applying brakes on a moving vehicle causes transfer of its weight partly, from the rear to the front wheels. Static analysis of Weight transfer effect significantly show that the load on the wheels during braking basically depend upon vehicle geometry i.e. the distance of the wheels from the center of gravity of the vehicle.
The function of ABS is to regulate the brake pressure of individual wheels which would experience braking force during the maneuver. ABS will regulate the wheel slip within a limit such that the Tractive force generated by the wheel varies linearly with the longitudinal slip. This condition will enable the controller to make exact approximations of the Total Tractive force generated by each wheel as Tractive force developed vary according to the wheel slip and the Normal load on the wheel. The controller shall estimate the amount of weight to be increased or decreased on the front and rear tires by displacing the suspension sub-assembly by the weight transfer mechanism.
-
Awards
-
 2013 Top 100 Entries
2013 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Shantanu Mishra
- Type of entry:individual
- Software used for this entry:Catia-V5, MSC Adams
- Patent status:pending