2021
Manufacturing/Robotics/Automation


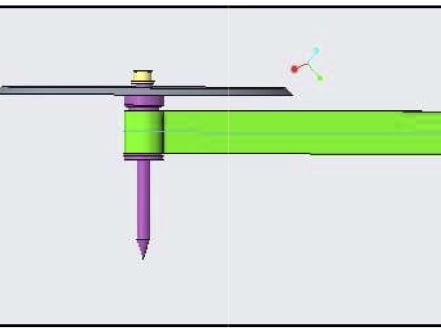
This design is focused on providing a very different approach in the usage of a compass with conventional tools. The concept of draughtsman vernier compass with scale. It consists of pin pointed end, graduated scale, slider. The scale is designed in such a way that the slider can slide over it. Slider can be located at various locations.

Our goal is to reduce RSI and to automate tasks in industries that haven’t used robotic arms yet due to high costs. We accomplish this by using gravity compensated robotic arms, allowing us to reduce motor cost, use simpler power electronics and control, and by designing backdriveable and inherently safe robotic arms.

Auto H20 is a team that started in the capstone program at San Diego State University. Four mechanical engineers, three electrical engineers, two computer engineers and one graphic designer student developed a full scale prototype of auquio. Auquio is a portable automatic water bottle filling station that uses an acoustic method to stop the flow of water.
The "Smart Plow" is the Snow Plow robotic Machine that attaches to the standard front mounting plate of the Cities' / Municipalities' Trucks.
It operates in the way that removes the snow from the street and deposits it selectively to the side of the street.
The snow will not be deposited at the entrance of any driveway,
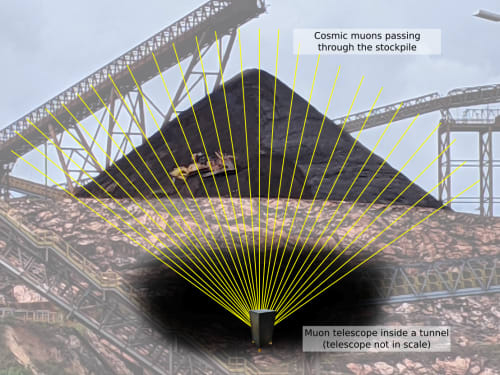
Measuring big things is always a challenge. To measure mountain size objects, the golden technique today is using drone topographic scan or ground topographic surveys. These are nice and precise techniques, but they have a few limitations: usually need human intervention,
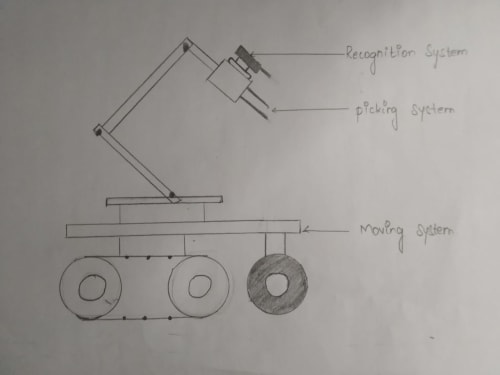
Flower Harvesting BOT is a new innovative idea which is developed in concern with Farm Labor, in order to reduce the work and time consumption of laborers. Generally, flower plants will be having the harmful thorns which harms the flower plucking laborers while plucking the flowers. Using the BOT, we can reduce this risk and harmless.
Currently, in the post-harvest chili industry, separation of the chili pod from the stem is highly manual and it limits the number of chilis that can be destemmed because of the workforce shortage and high costs. Our objective and strategy are to fully automate the separation process with minimal human interference.

LV-01, a disaster mitigation research robot to house modular payloads ranging from sensors to manipulators to help and assist with disasters along side first responders in singular or collaborative from.
Page 1 of 4