2019
Manufacturing/Robotics/Automation
A drive unit comprising a two part-electric motor and a gear box coupled thereto is known. Gear box that is needed to reduce the output speed and thereby increase the torque. A disadvantage of the known drive unit is that it results in substantial costs,

Design of user-friendly gripper to grasp both symmetrical and non-symmetrical complex geometrical objects. The proposed design is modeled, analyzed and simulated using Solidworks and Ansys software. The fabrication of the gripper should be using 3D printing technology with PLA. The operation and control will be carried out by using PLC,


BACKGROUND:
Every year thousands of people lose body parts in accidents caused by different ways. Usually most of the other parts which are used to interact with computer are lost, but the eyes are still working, so why don't we use them? It doesn't mean if he or she doesn't have hands or he or she can't speak,

Design Statement:
Design consists of the following main parts.
1. Panels
2. Steer Wire Rope / Steel Bars or Tubes
3. Lap Lock Joint
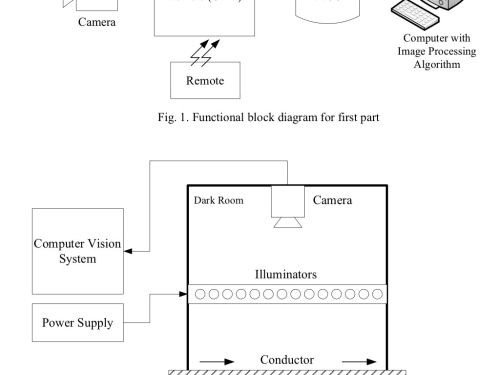
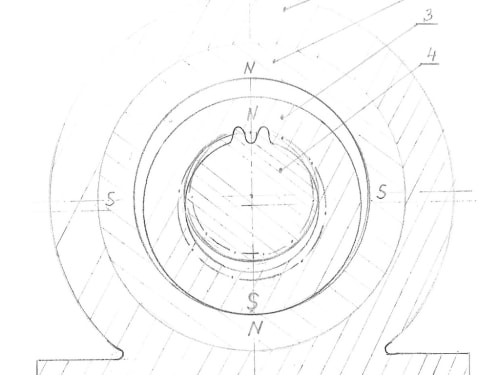
Abstract: The proposed project concerns about a failure analysis of an electric aluminum alloy conductors damaged and broken for fretting fatigue phenomena induced by aeolian vibrations. Life of electric conductors is often reduced by various degradation mechanisms such as repeated bending, fluctuating tension, distortion, fatigue, wear and corrosion phenomena.

Innovative concepts in lightweight engineering for automotive and aerospace applications increasingly trust in Multi-Material-Design. Additionally metal-plastic-combinations are often used in white or brown goods as well as within the furniture industry or in novel architecture concepts. A special challenge for multi material designs is the joining process. Existing technologies to join metals to polymers,

Background and Motivation
The conceptual manufacturing process of Hybrid Single Shot (HSS) has been developed by Clemson Composite Center to enable production of customized hybrid structures in one single operation. The metal-polymer sandwich structures provide superior properties such as high bending inertia, sound and heat insulation, and high energy absorption,

We live in a coastal town in India called Pondicherry famously known for its serene beaches and coastal activities. Over the years, as the city has developed, it has attracted more tourism, which has resulted in an increase of littering on the once clean and beautiful beaches.

Traceability in plastic production is difficult, so we wanted to develop a general solution which did not cause any extra headaches.
We aim to place barcodes on injection molded plastic products of any size, color and geometry, without adding processes or requiring materials or contamination of the part. The barcodes should be scannable by in-line vision or scanners,
Page 2 of 4