2015
Machinery/Automation/Robotics
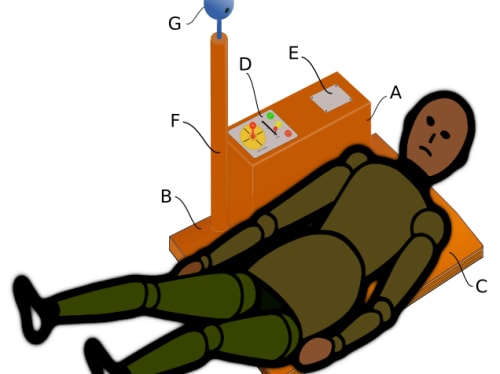
Growing population of older adults wants to live independent life style in their homes or senior communities. While older people can look out for each other, they cannot help much when one of them falls on the floor except to make a phone call.

Problem :
The world is booming with smart technology. In this generation people wish to have things done at their fingertips. Along with this we also need to conserve electricity to face the power crisis. A lot of power is wasted when the loads are on when not required.

A Relief valve is a safety device used in fluid process systems to prevent abnormally high pressure that could cause danger to people, process and equipment.
When an abnormally high pressure develops in the system, the fluid force exceeds the spring force and so the valve opens to relieve the high pressure.

The SAMP is a robotic platform whose objectives are to perform small tasks ranging from transportation of materials and documents to monitoring and assisting in surgical procedures, in an effort to relieve the nurse from doing those jobs, when they can be engaged in more critical applications around the healthcare facility.

Our aim is to construct a Tele Semi Humanoid Robot, which acts according to the physical movements of the Operator. We have divided the project into two stages first stage using the robot with wired technique and followed by second stage wireless.

Idea Description:
The visual inspection of Tele-Communication (TC) and its connections, antennas, antenna mountings, poles, waveguide bridges, corrosion and erosion of structural components, breaking of guy wires, missing of bolt and nuts, verticality of the structure, lighting and earthing system in the towers must be carried out periodically to avoid technical and structural problems.

This Helical Impeller was designed to solve the problem of the Dead Zone in the Gulf of Mexico. The Dead Zone is an area where the oxygen-rich fresh water at the surface does not mix with the oxygen-poor saltwater on the bottom, creating a region on the sea floor with no oxygen.

"Applied Predictive Decision Environment (APDE 4.0) Is an Integrated Predictive Analytics Platform software system designed specifically to take advantage of a massively parallel vectorized architecture running on Global Intelligence Corporation's newest 275,600 core supercomputer platform know as Thunderbird that, ingests massive amounts of multiple lingual mixed media information from 127,000+ global data sources,
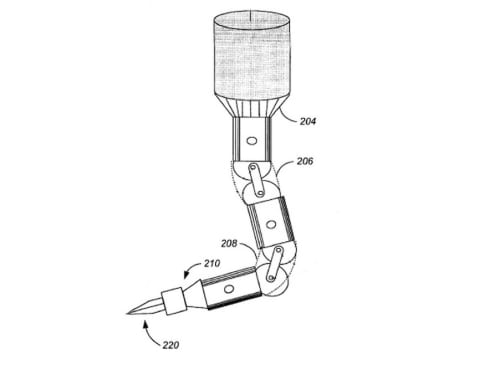
NASA’s Jet Propulsion Laboratory has developed a robot-assisted microsurgery (RAMS) system to allow surgeons to do the impossible and perform surgical procedures beyond the capability of human hand dexterity. A surgeon operating a RAMS system can feel soft tissues with greater sensitivity and can manipulate surgical tools with greater exaggeration and precision.

This is very useful for who all are driving two wheelers.
In two wheeler rear side above the brake light need to fit one sensor or camera. This has cover rear side of the vehicle all around 1 meter. This all information has to show in front of the cluster in separate screen.
Page 9 of 10