2016
Machinery/Automation/Robotics

Introduction
Combining a traditional building material (ceramics) with a new fabrication technique (3D printing) to re-think an ancient building component (bricks), this project demonstrates how 3D printers can become portable, inexpensive brick factories for large-scale construction. Bricks are an ancient building component and their fabrication has seen several innovations throughout history;
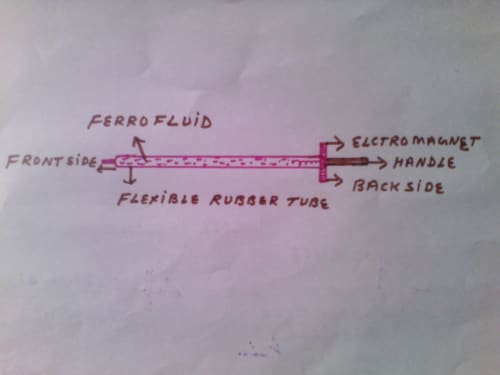
This tube will be very useful to do work from a safe distance. We can use this tube for cutting, brushing, cleaning, monitoring, holding and for many other types of work. This tube will work as a Robotic arm.
Mechanism: According to the diagram there will be a flexible rubber tube which will be filled with ferrofluid.
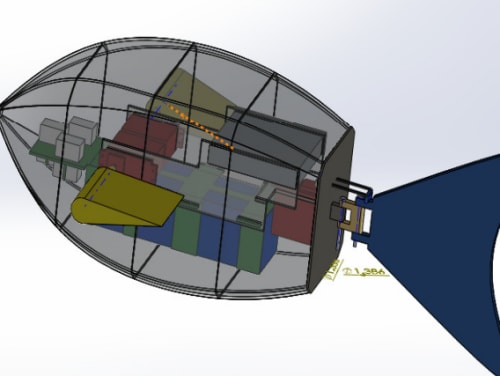
Autonomous Robot for underwater exploration with high cruising speed and efficient in terms of propulsion and stability. Designed robot is mimics the biology of a fish for its behavioral function and its structural anatomies. Among the various biological locomotion techniques in liquid environment, the fish appears to have most characteristics in a single body.

This study aimed to design and develop a multi-purpose controller to measure and control moisture, temperature, and time. Specifically, it aimed to design and develop microcontroller circuit for the controller; make assembly language program for the microcontroller;

The present automatic transmission is fully mechanically controlled and the cost is very high. In this study, a gear shifting mechanism was designed and applied on a clutch featured bike to make the gear transmission process faster and less destructible for the driver using push button system design.

The project has its bases in two existing technologies. The first one is a multirotor drone and the second is an articulated robot. Their combination results in a DROBOT. The main purpose of this project is to combine both flexibility characteristics to ensure feasibility of some tasks.

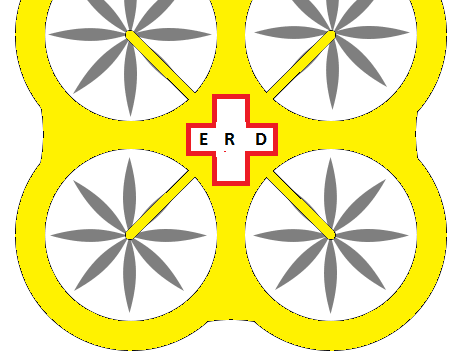
Our project is about agriculture & photography purposes. The idea is that we can use drones for spraying pesticides on crops. Spraying pesticides on crops is a very big problem because this pesticide is very harmful for the human body and it causes various diseases. A spraying machine is attached to the drone,

Working Principle: With a very low budget (around 100 US dollars) we were able to make a full functioning 4-axes pick and place robot. In present situation the dominance of pick and place robot in industries is much higher than other type of robots and they are very costly. Robot we made consist of servo motors(4 nos),

Egor v.2 can track movement and respond to questions via a wireless keyboard. However, voice recognition can be implemented using Macs dictation and speech function in system preferences in-putted via the Xbox Kinect's internal quad mic set up. The robot uses an adapted version of the Eliza algorithmic framework (Siri derivative) to respond to participant questions,
Page 4 of 9